Lime_Gen3_IoT_Replacement
Note: This project is not endorsed or supported by Lime or any affiliated companies. Only do this on legally obtained scooter that you own! You can often buy them on auctions.

The goal of this project is to replace the IoT of the Lime Gen 3 with a custom one, so we can controll it with our own app. If you find out more about the communication, please submit it here.
I am currently working on the PCB and the App. As soon as I have a working prototype, I will published it here.
How it works
The IoT module gets replaced with an ESP32 microcontroller to enable us to control the scooter with our app. The app communicates with the ESP32 using Bluetooth Low Energy (BLE). The ESP32 replaces the function of the original IoT while also providing real-time feedback on speed, battery level, and other information.
Installation
Install the ESP32 add-on for Arduino IDE if you doesnt have already. Here is a tutorial
Flash the controller with unlocked firmware.
Flash the arduino code from LimeIoT folder to the esp32.
Note: The controller gives you 36v. So you have to convert it to stable 5v for the display and the esp32. I have done it using a buck converter and ams1117.
Connect the wires:
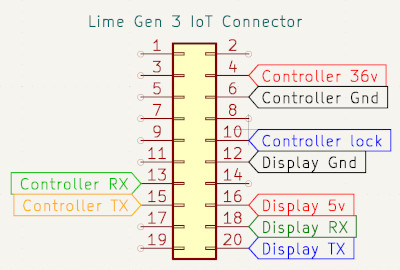
| Connector | ESP32 |
|---|---|
| Controller lock | GPIO 13 |
| Controller RX | GPIO 1 |
| Controller TX | GPIO 3 |
| Controller 36v | Buck converter -> ams1117 -> 5V |
| Controller Gnd | Gnd |
| Display 5v | 5V |
| Display Gnd | Gnd |
| Display TX | GPIO 16 |
| Display RX | GPIO 17 |
If you want, you can connect the speaker to GPIO 14.
Usage
You can download the app here: App.apk
The default bluetooth password is 123456789. You can change it in the ble_security.ino file.
Currently only compatible on android and is only looking good with Material You compatible phones.
If you dont want/can use the app, you can just download a bluetooth terminal app like nRF Connect (Play Store | App Store) and send the commands yourself:
| Commands | Action |
|---|---|
unlock |
Unlocks the scooter |
lock |
Turns off the controller |
unlockforever |
Keeps the scooter unlocked when disconnecting |
alarm |
let the scooter beeb (if speaker is connected ) |
Controller Communication
To unlock the controller, the blue wire that is connected to the IoT needs to be supplied with 3.3V, and the hex command 4643110100084C494D4542494B45BE8A needs to be sent at a baudrate of 9600 every 500ms. Cutting the 3.3V supply and stopping the command transmission will power off the controller after approximately 60 seconds.
The command sent by the controller to the IoT consists of 42 bytes. The 9th byte represents the speed, and the 20th byte represents the battery level. The last two bytes of the command are a CRC-16/XMODEM checksum.
| Byte number | Meaning |
|---|---|
| 9 | Speed |
| 20 | Batttery |
| last two bytes | CRC-16/XMODEM checksum |
Example: 46 58 0C FF 00 22 11 00 00 40 00 00 41 3F 60 42 00 FF 44 64 52 00 61 F1 80 00 00 72 01 5C 01 59 82 00 00 00 00 E0 00 00 0A B3
Display Communication
- Baudrate:
115200 - Checksum:
width=8 poly=0x31 init=0x0a refin=true refout=true xorout=0x00 check=0xc1 residue=0x00
The following table shows the known meaning of the bytes in the commands send to the display:
| Byte | Meaning |
|---|---|
| 12 | Status (see below) |
| 14 | Batttery |
| 16-17 | Speed |
| last byte | checksum |
Status Bytes:
| Byte | Status |
|---|---|
| 21 | Scan To Ride |
| 22 | Unavailable |
| 23 | Paused |
| 24 | Locked |
| 25 | Done |
| 26 | Charging |
| 31 | Driving |
| 41 | Driving Low Battery |
| 42 | Driving Alert |
| 43 | Driving No Parking |
| 44 | Driving No Riding |
| 45 | Driving Max Speed |
| 51 | Upgrading |