![]()
![]()
PathPlanner


Download from one of the above app stores to receive auto-updates. Manual installs can be found here.
About
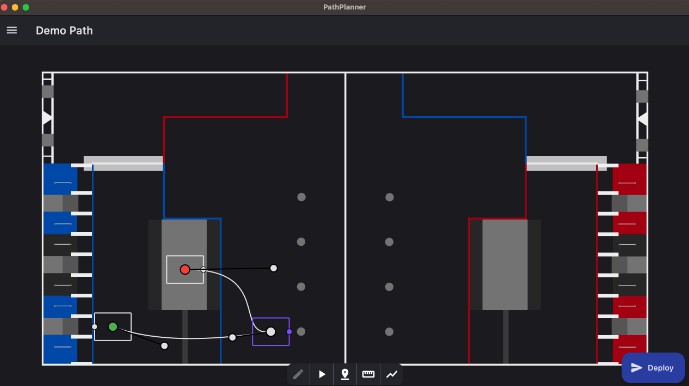
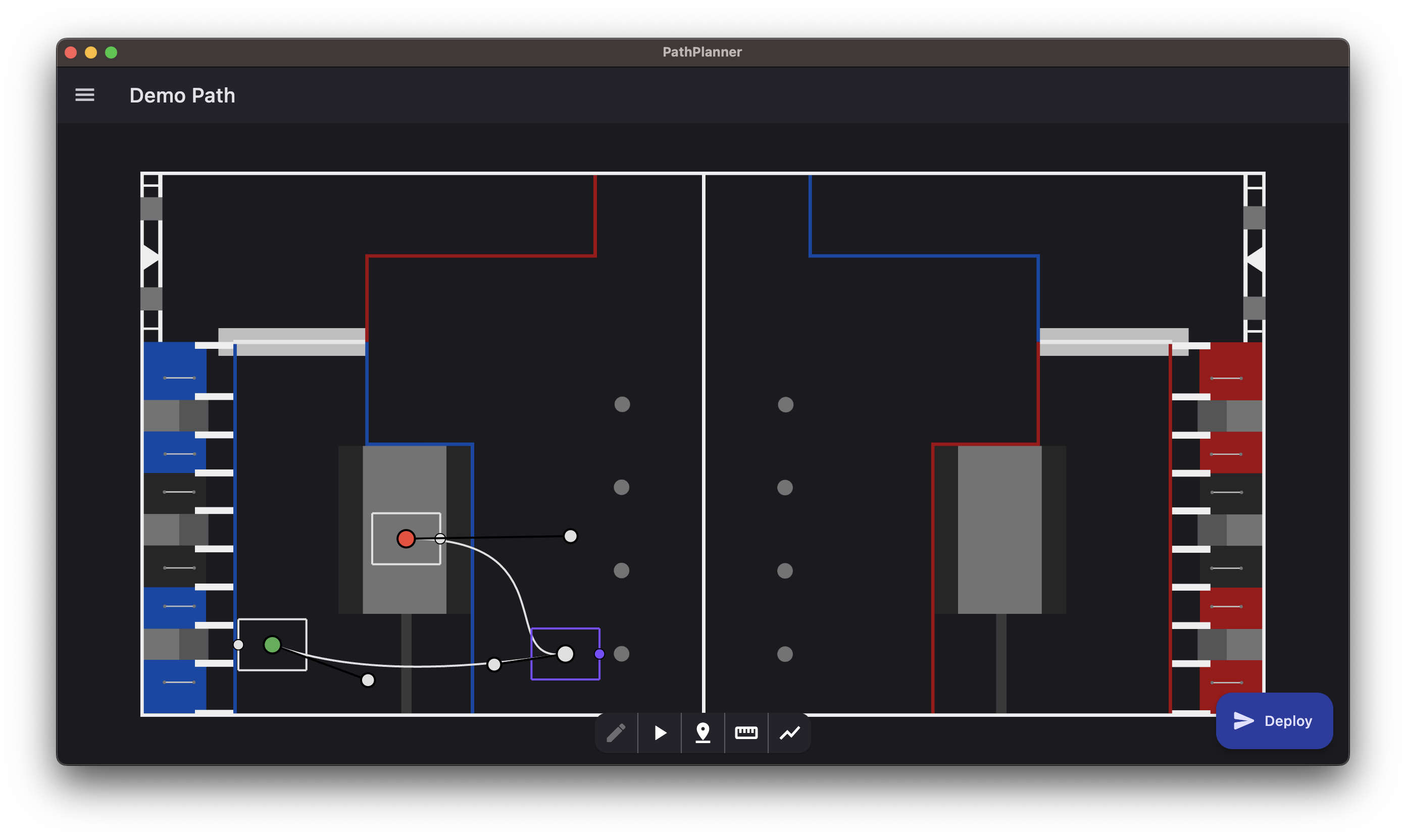 PathPlanner is a motion profile generator for FRC robots created by team 3015. The main features of PathPlanner include:
PathPlanner is a motion profile generator for FRC robots created by team 3015. The main features of PathPlanner include:
- Each path is made with Bézier curves, allowing fine tuning of the exact path shape.
- Holonomic mode supports decoupling the robot’s rotation from its direction of travel.
- Real-time path preview
- Allows placing “event markers” along the path which can be used to trigger other code while path following.
- Split a path into a “path group” to follow each part of a path seperately.
- Auto path saving and file management
- Robot-side vendor library for path generation and custom path following commands/controllers
- Full autonomous command generation with PathPlannerLib AutoBuilder
Usage and Documentation
Check the Wiki
Make sure you install PathPlannerLib to generate your paths. Paths can be pre-generated as CSV or WPILib JSON files, but the vendor library is much easier to use and supports all of the features of the GUI.
How to build manually:
- Install Flutter (this project currently uses v3.3.9)
- Open the project in a terminal and run the following command:
flutter build <PLATFORM>- Valid platforms are:
- windows
- macos
- linux
- Valid platforms are:
- The built app will be located here:
- Windows:
<PROJECT DIR>/build/windows/runner/Release - maxOS:
<PROJECT DIR>/build/macos/Build/Products/Release - Linux:
<PROJECT DIR>/build/linux/x64/release/bundle
- Windows:
- OR
flutter runto run in debug mode